|
Microtechnology
The two photographs below
appeared in The MEMS Handbook, edited by Mohamed Gad-el-Hak, published
by CRC Press (2002), second edition in three volumes published by CRC
Taylor & Francis (2006). Directly below is the first walking
microrobot with a Swedish wasp relishing a ride on its back. The
out-of-plane rotation of the eight legs is obtained by thermal
shrinkage of polyimide in V-grooves (PVG). Leg movements are effected
by sending heating pulses via integrated heaters causing the polyimide
joints to expand. The size of the silicon legs is 1000x600x30 microns,
and the overall chip size of the robot is 15x5x0.5 mm. The walking
speed is 6 mm/s and the robot can carry 50 times its own weight.
Photograph by Per Westergard, Vetenskapsjournalisterna, Sweden,
courtesy of Thorbjorn Ebefors, Royal Institute of Technology, Sweden.

The second picture is a scanning
electron micrograph of a 12-layer microchain fabricated in nickel using
the Electrochemical Fabrication (EFAB) technology. Overall height of
the chain is around 100 microns and the width of a chain link is about
290 microns. All horizontal links are free to move, while the vertical
links are attached to the substrate. By simply including a sacrificial
layer beneath the links, the entire chain can be released from the
substrate. The microchain is fabricated in a pre-assembled state,
without the need for actual assembly. The beast towering over the
microchain is a humble, picnic-loving ant.
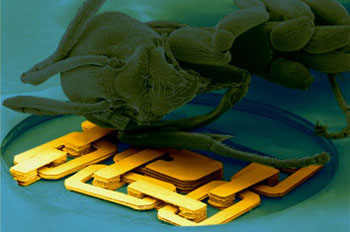
Photograph courtesy of
Adam L. Cohen, MEMGen Corporation, U.S.A.
|
