Fuzzy logic has been sucesfully used for representing knowledge in the form of fuzzy rules that have fuzzy membership functions. Unlike in the case of crisp membership degree, where certain object either is or is not a member of the group, fuzzy logic enables partial membership specified by the degree of belonging. It constitutes a natural way of representing uncertainty and impression with a system. Fuzzy logic is capable of modeling complex and highly non-linear systems using human undestandable rules. It was applied to a wide range of control applications and system modeling.
Fuzzy logic controller (FLC )models the functional relationship between system inputs and system outputs. The result depends on the number of fuzzy sets used as well as on their shapes and positions. In this project the control surface modeling capabilities of fuzzy logic were compared to the artificial neural networks (ANN). Two types of FLC - Zadeh and Takage-Sugeno - were used as well as triangular, trapezoidal and gaussian membership functions. Different architectures of the ANN were tested in order to demostrate the need for an optimal network architecture.
The concept of type-2 fuzzy logic extends the type-1 fuzzy logic by introducing another dimension of fuzzines that helps to model uncertainty and unclear relations. Instead of only reporting the fuzzy degree of membership to a certain fuzzy set type-2 fuzzy logic describes the uncertainty about this degree by another type-1 fuzzy set. This is especially usefull in cases when the exact type-1 fuzzy membership function cannot be determind.
The computational efforts associated with the inference process and especially with the type-reduction phase of general Type-2 Fuzzy Systems are prohibitively large. Hence, general T2 FS are rarely used in engineering application, despite of their theoretical potentials. Several solutions have been proposed. Simplification of general T2 FS into Interval T2 FS by Karnik and Mendel enabled the use of T2 FS in praxis. Further, Coupland and John exploited the computational geometry to speed-up the inferencing and the defuzzification process of general T2 FS. The same authors also proposed a sampling defuzzifier, which provided an approximate solution. Recently, Liu offered a computationally effective defuzzification strategy using the a -plane representation of general T2 FS. This work proposes a novel importance sampling based defuzzification algorithm for general T2 FS. It is inspired by the previously published sampling defuzzification method. The importance of different embedded sets is modeled using a Gaussian probability distribution function. The parameters of the sampling function are computed based on the FOU of the general T2 FS. When compared to the original sampling defuzzification method, the implemented importance sampling strategy reduces variance of the calculated values and gives a smoother response of the respective T2 FLS.
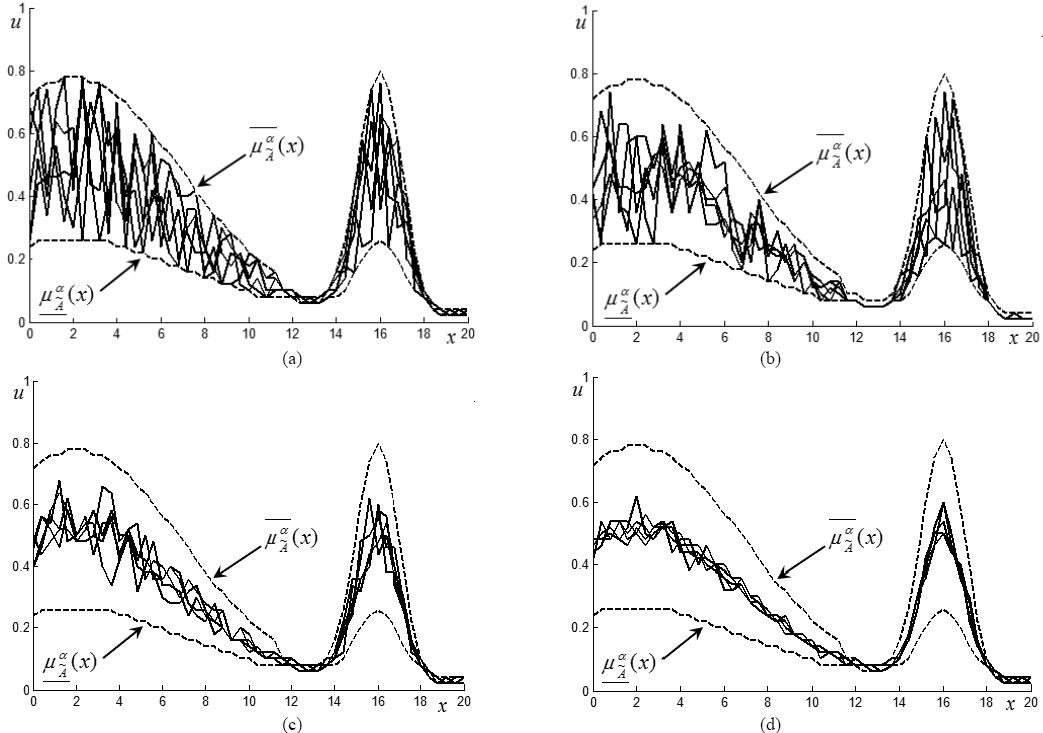
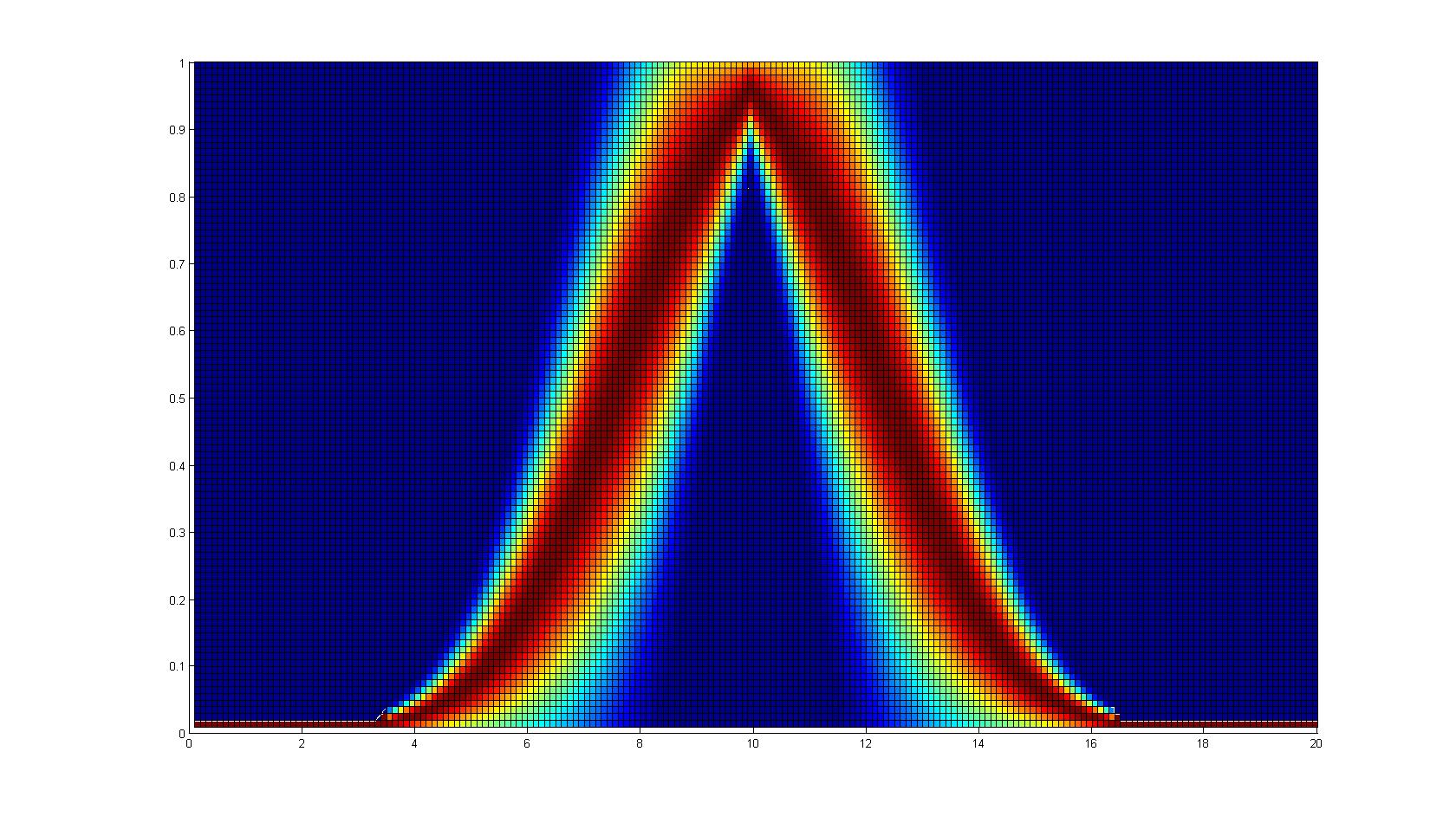
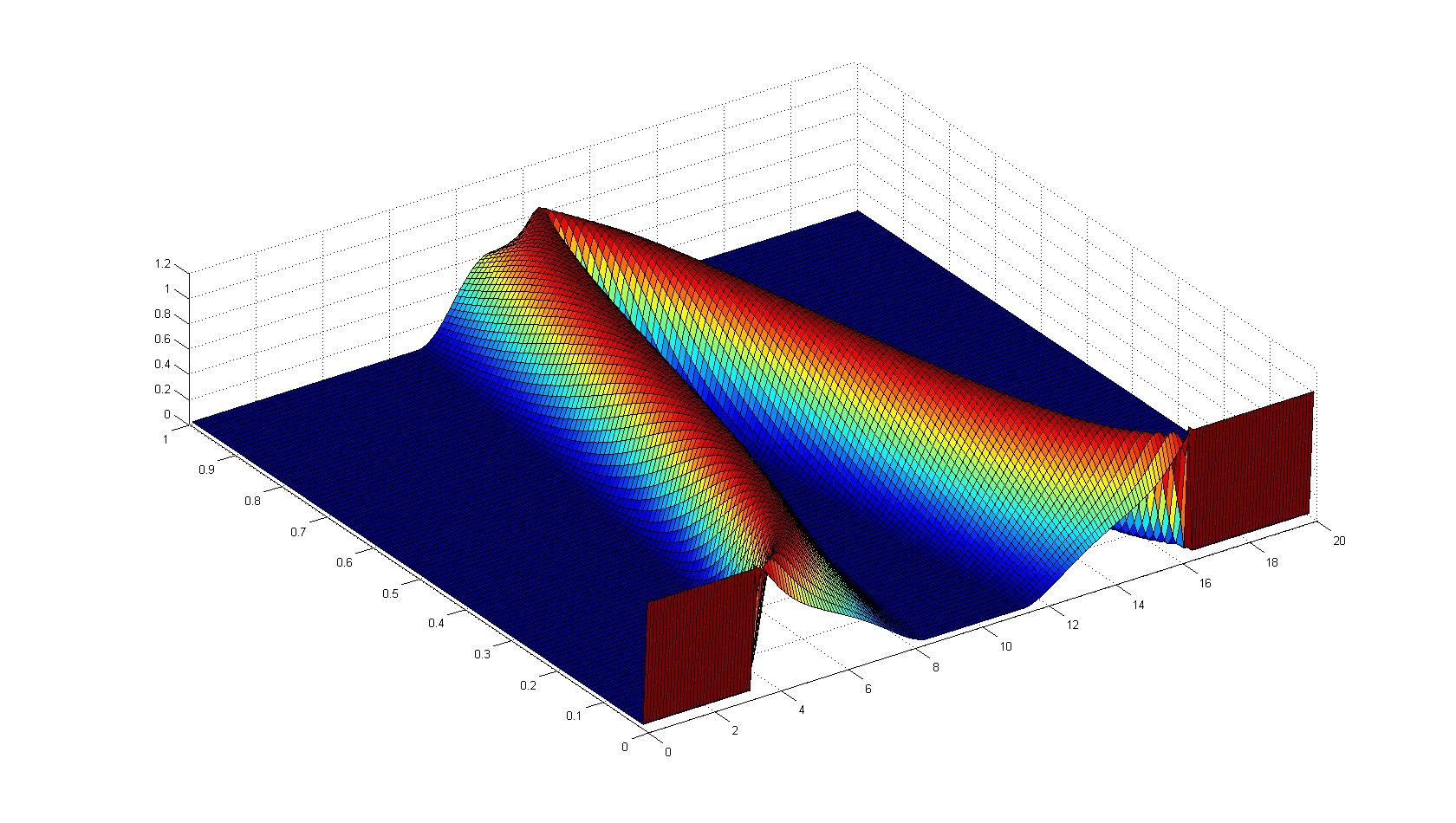
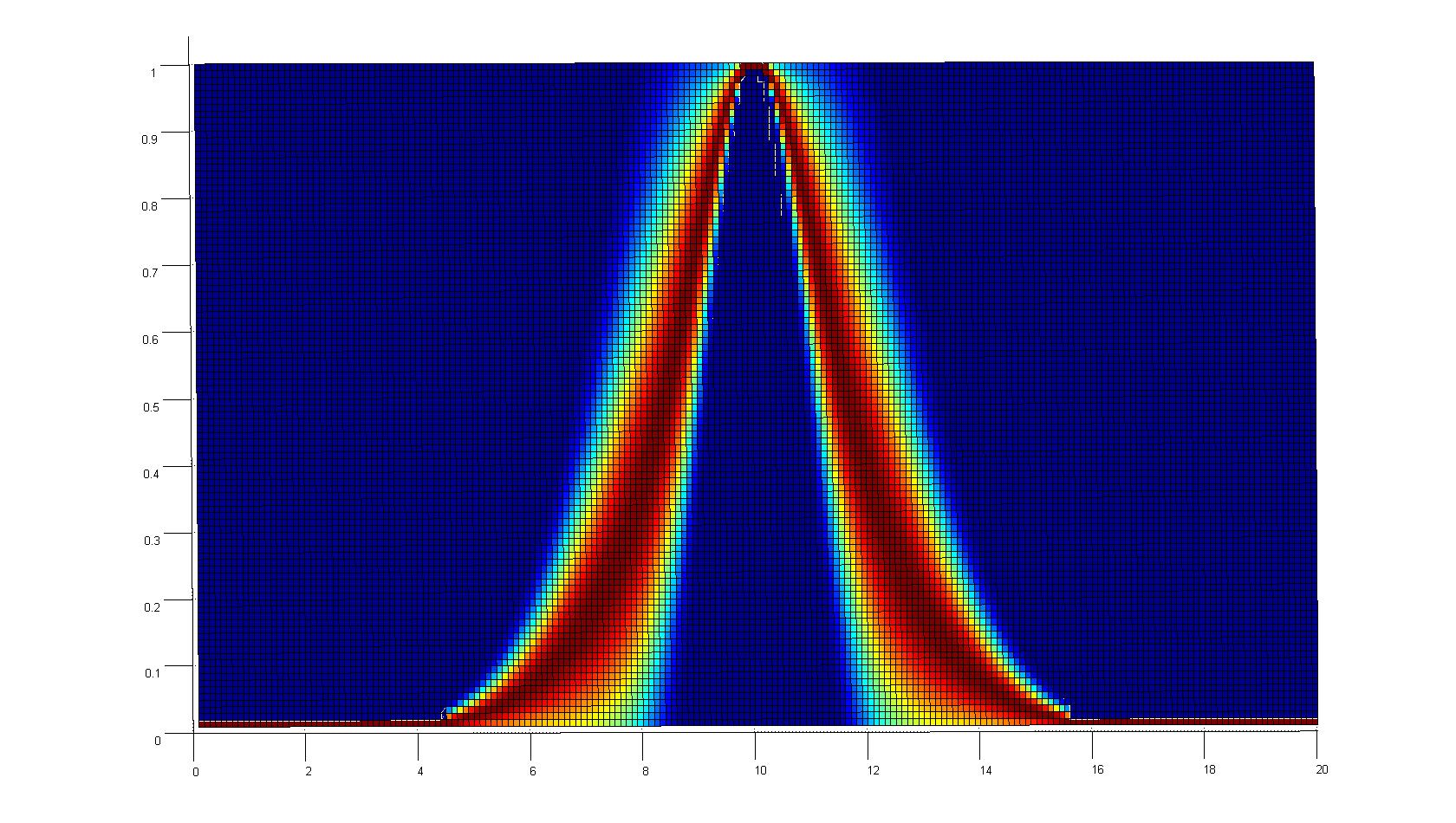
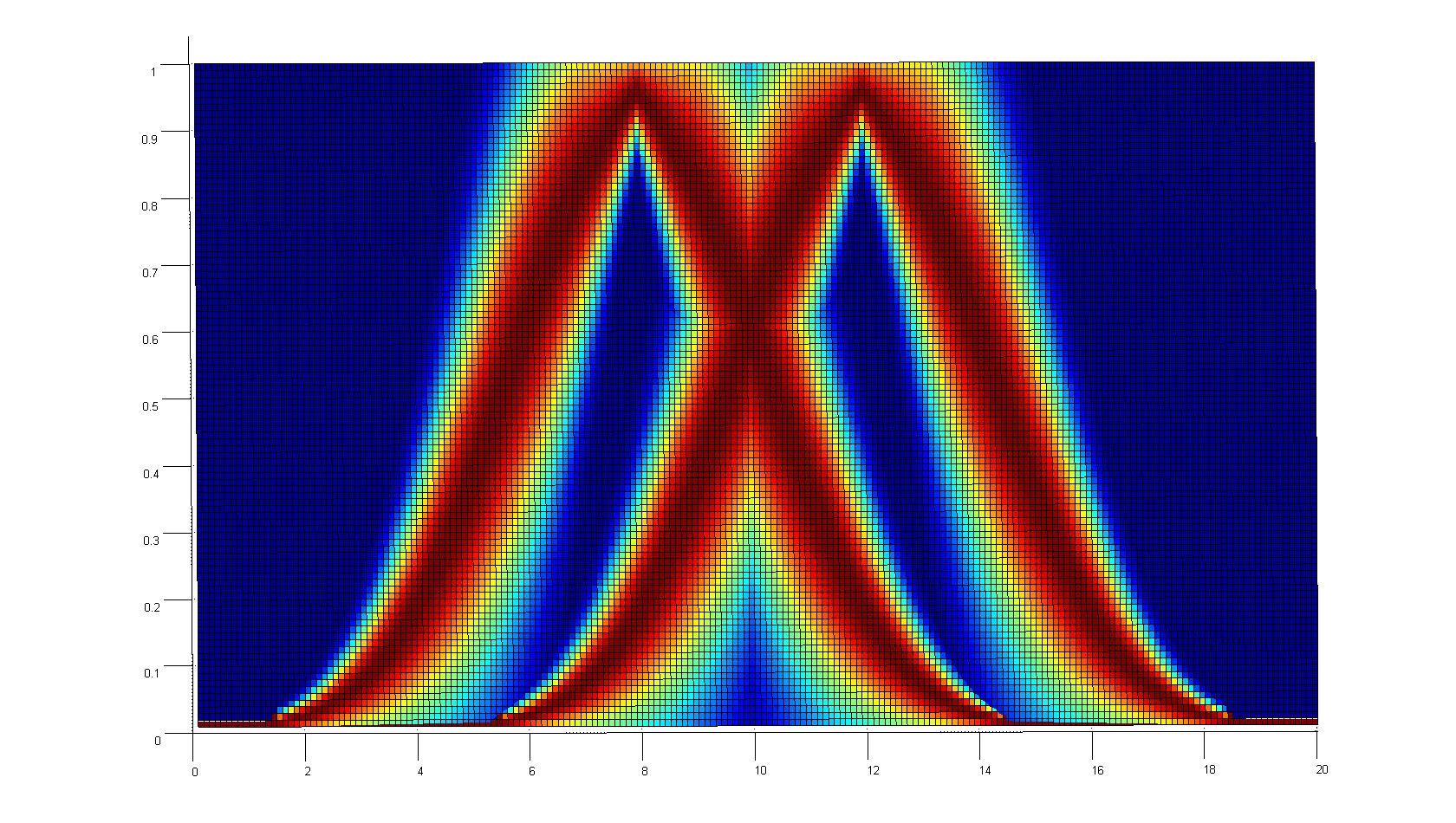
Five sampled embedded fuzzy sets using uniform sampling (a) and using importance sampling for ß = 2, 4,8 (b)-(d).
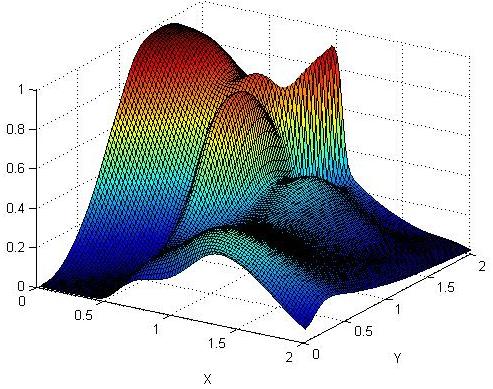
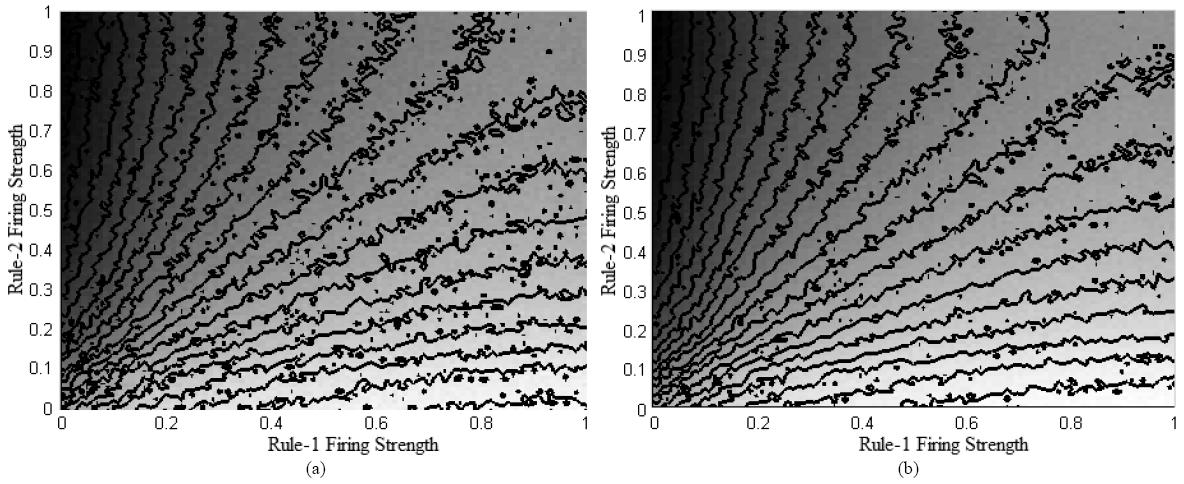
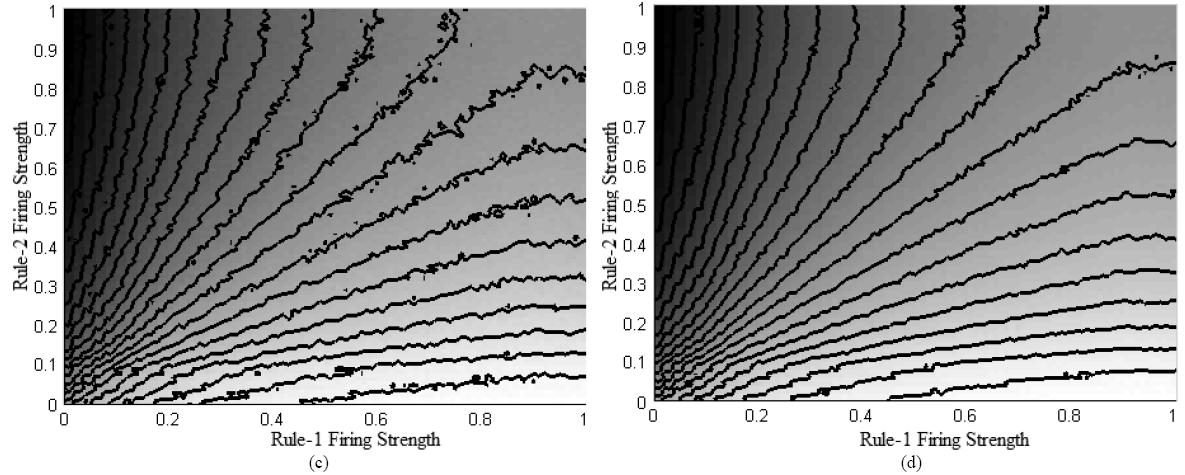
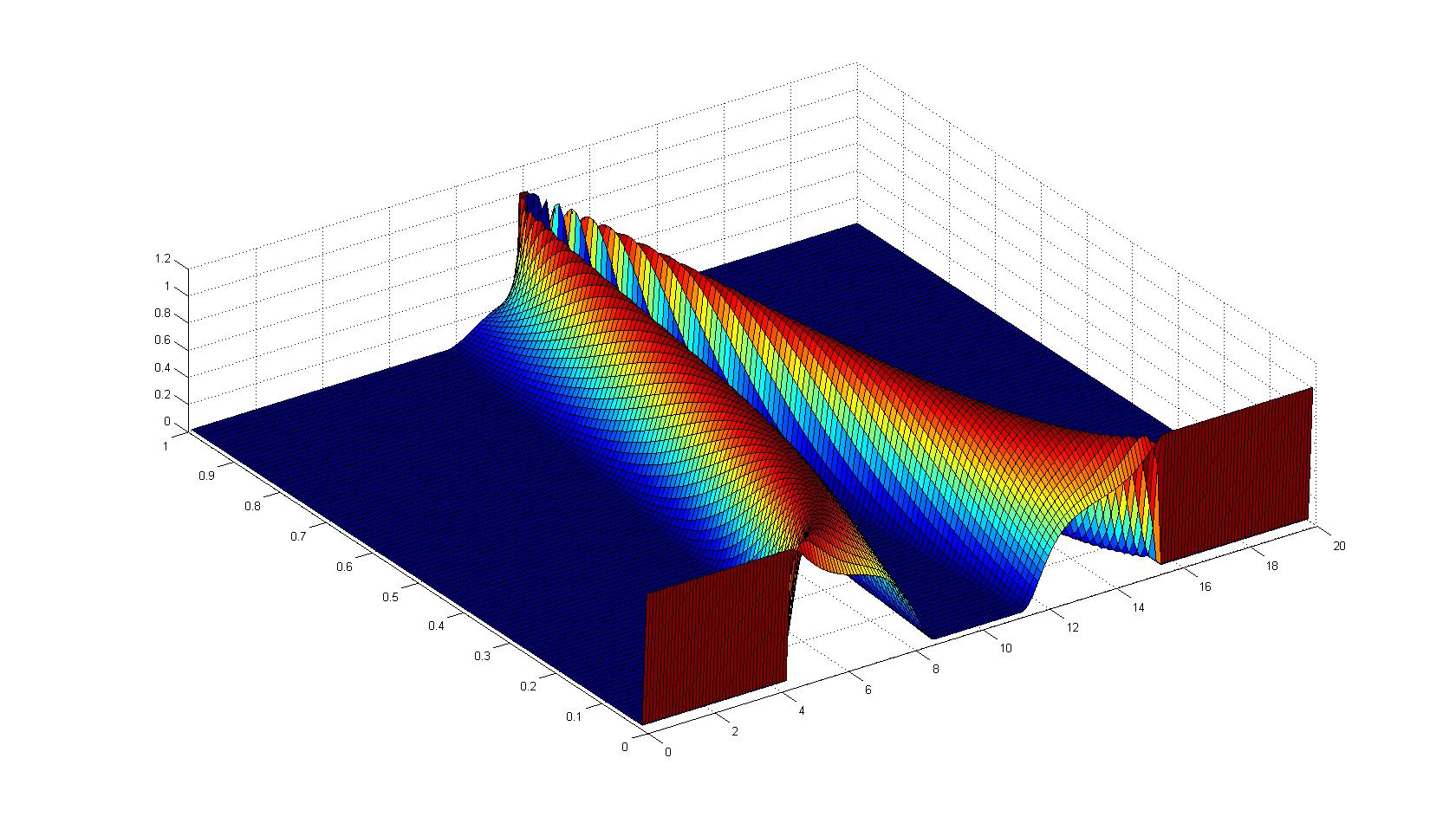
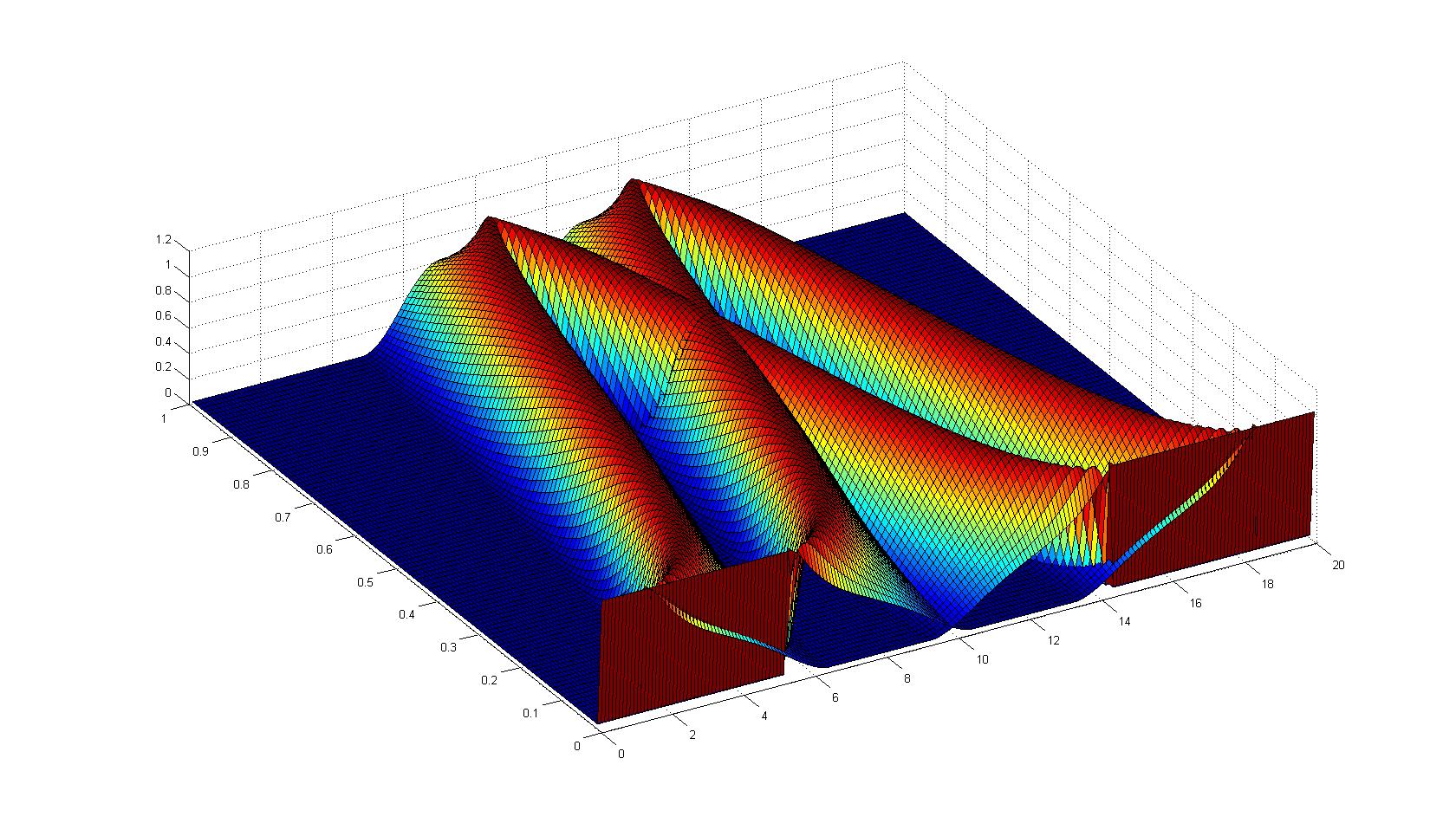
Comparison of the output surfaces for the sampling defuzzifier (a) and the importance sampling based defuzzifier with ß = 2, 4,8 (b)-(d).
Paper: Importance Sampling Based Defuzzification for General Type-2 Fuzzy Sets, FUZZ-IEEE 2010. Papers Abstract PDF
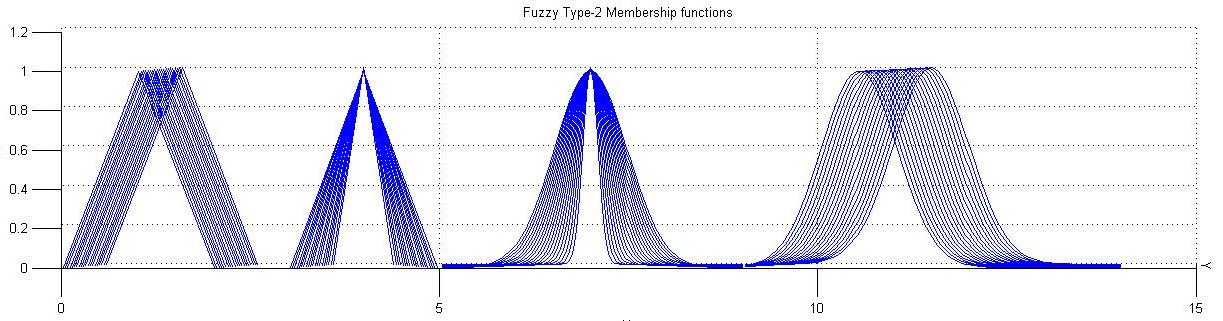
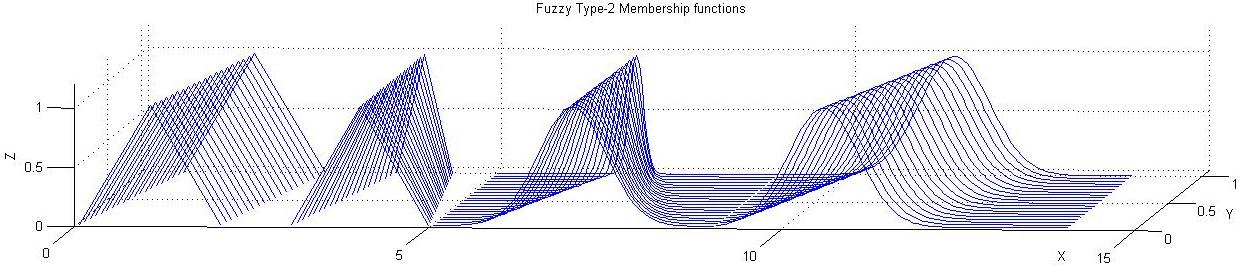
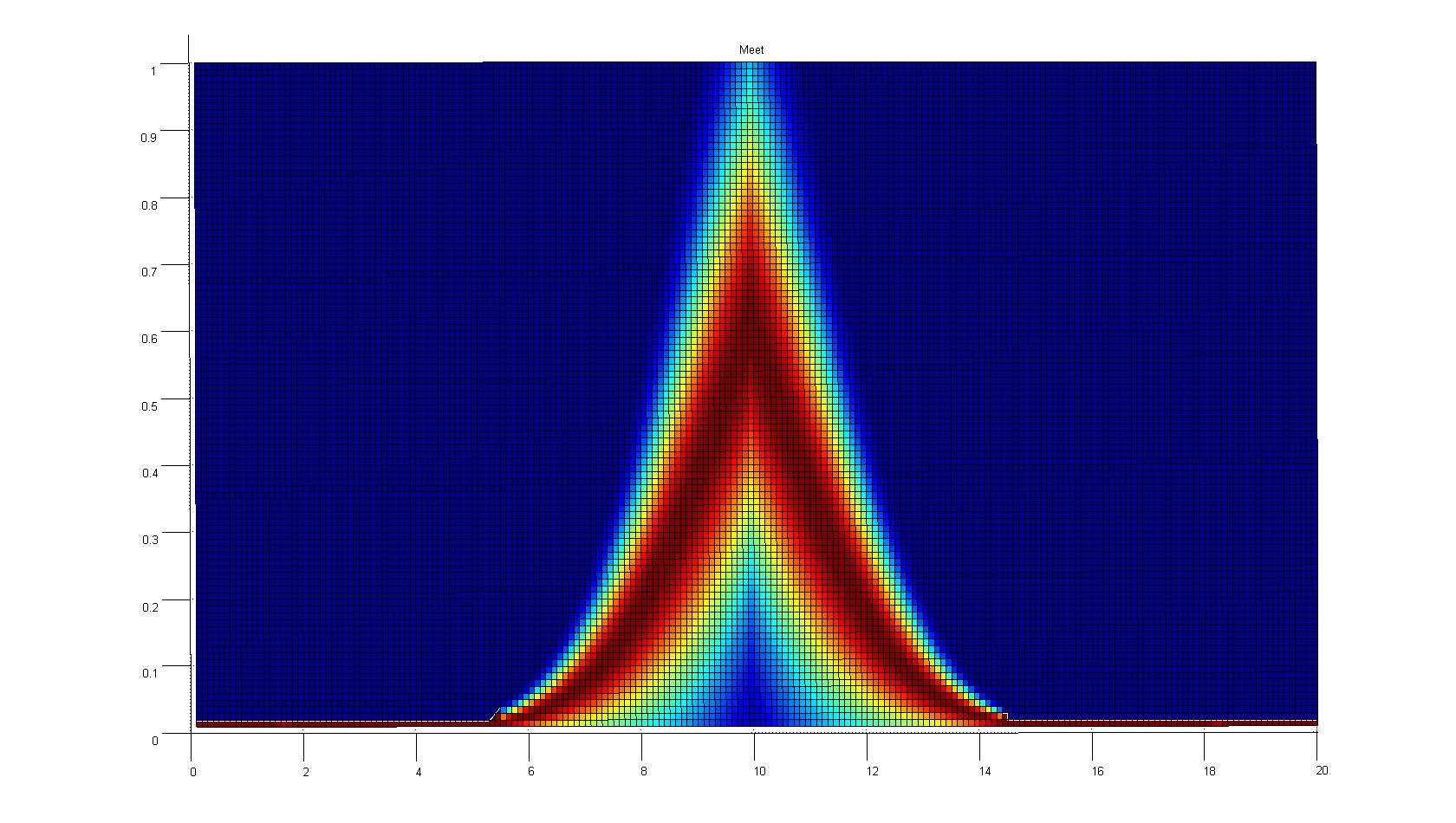
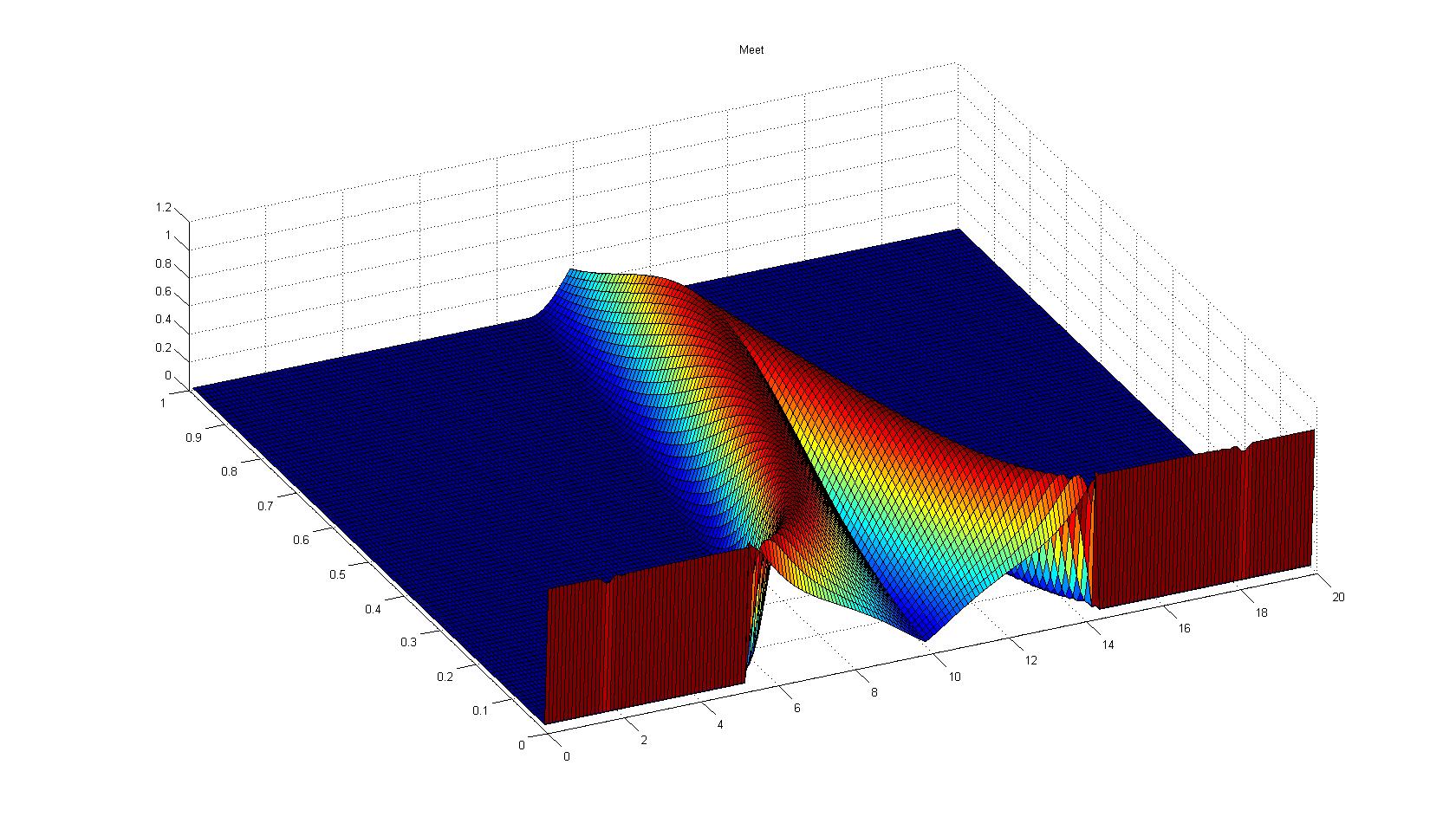
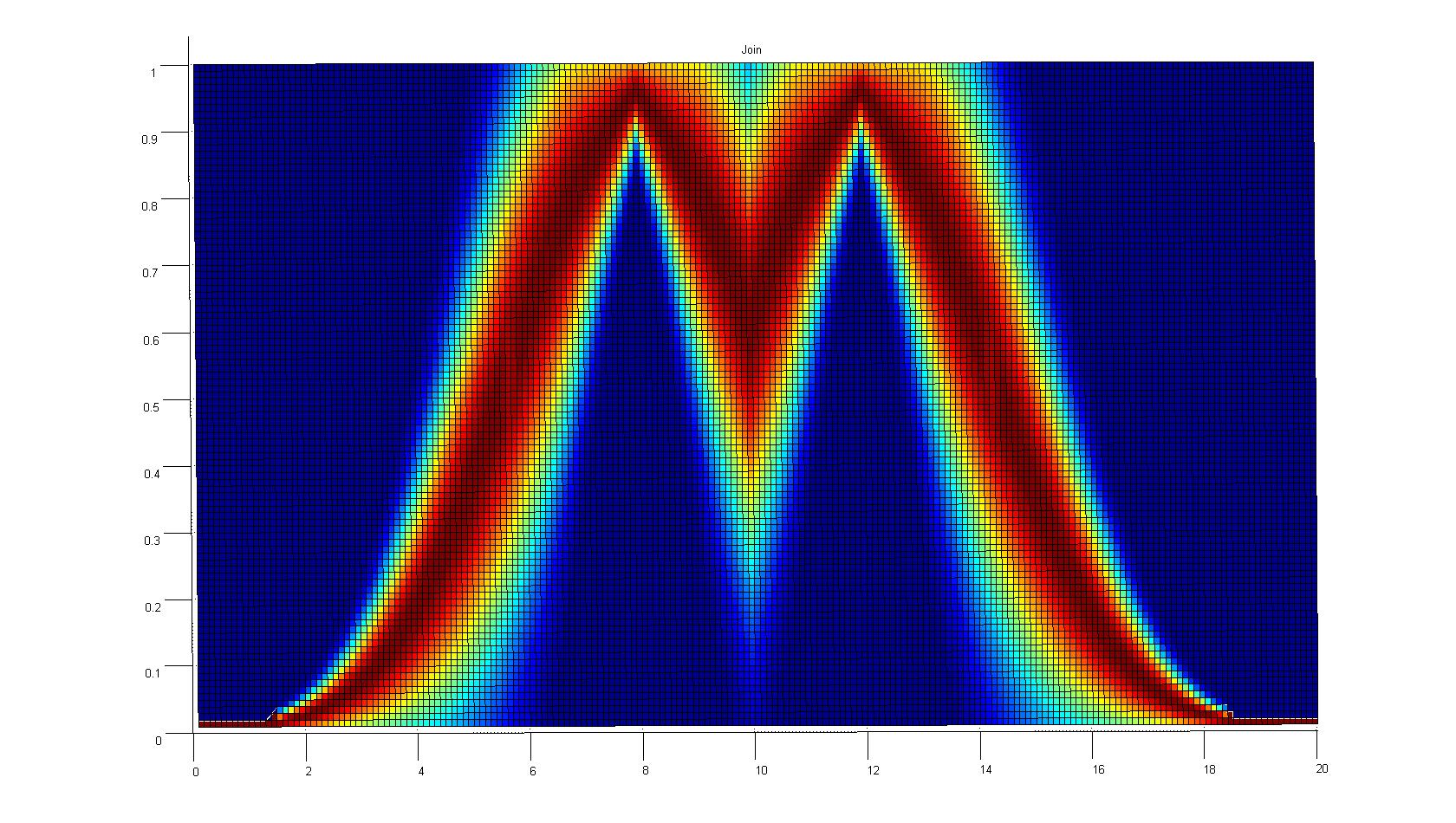
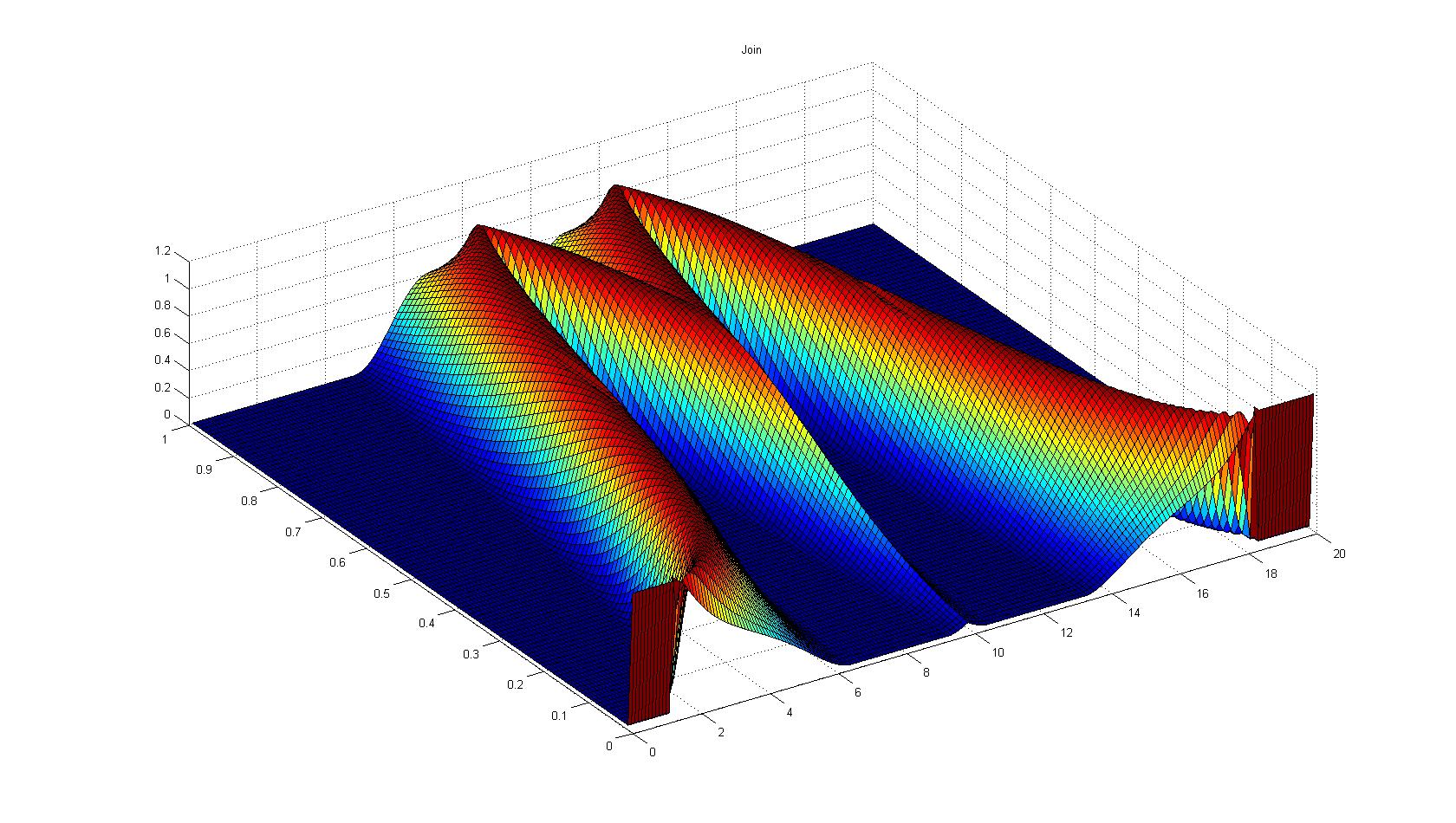
A visualization tool for the type-2 fuzzy membership functions and fuzzy type-2 operations meet and join was implemented in Matlab programing environment.
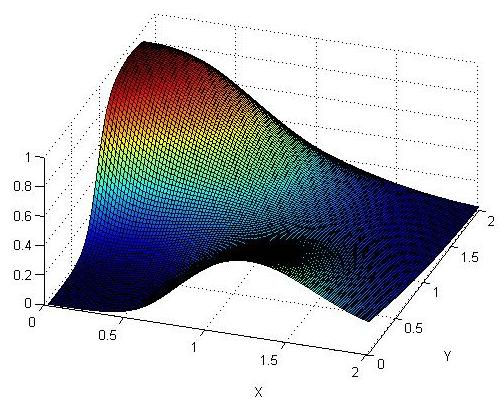
Fuzzy Type-2 Fuzzy Sets:
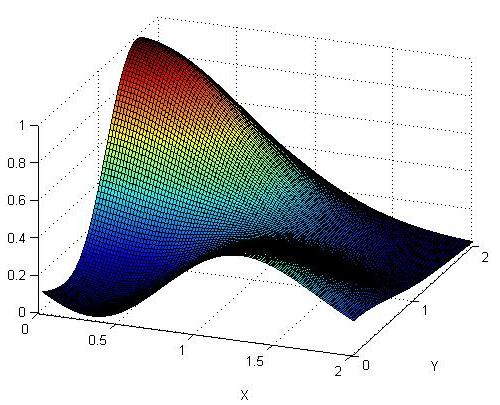
Combining 2 Fuzzy Type-2 Sets
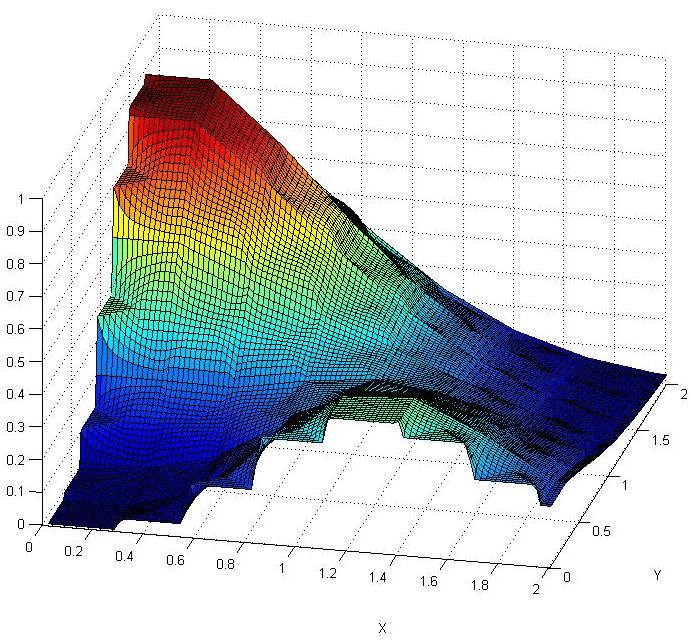
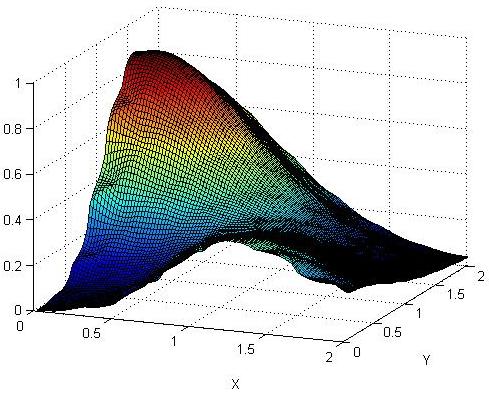
Fuzzy Type-2 Intersection - Meet
Fuzzy Type-2 Union - Join
Despite its being a powerful concept, Fuzzy Type-2 Logic sufferes from extensive computational complexity. Many relaxation to the original concept have been proposed in order to alleviate the complexity issue. The concept of Nonstationary Fuzzy Sets [1] was implemented in Matlab programming environment and compared to the original Fuzzy Type-2 Systems.
[1] J. M. Garibaldi, M. Jaroszewski, S. Musikasuwan, "Nonstationary Fuzzy Sets," IEEE Transaction on Fuzzy Systems, vol. 16, no. 4, pp. 1072-1086, 2008.